立即开户
快速上手技巧,轻松学会,高效掌握!

快速上手技巧,轻松学会,高效掌握!


新民晚报记者今天(6日)获悉,商汤科技选藏开源空间智能模子日日新SenseNova-SI-1.3,其在空间测量、视角调遣、空洞推理等中枢任务中展现出权臣普及,另外对比之前的版块增强了回复简答题的身手。
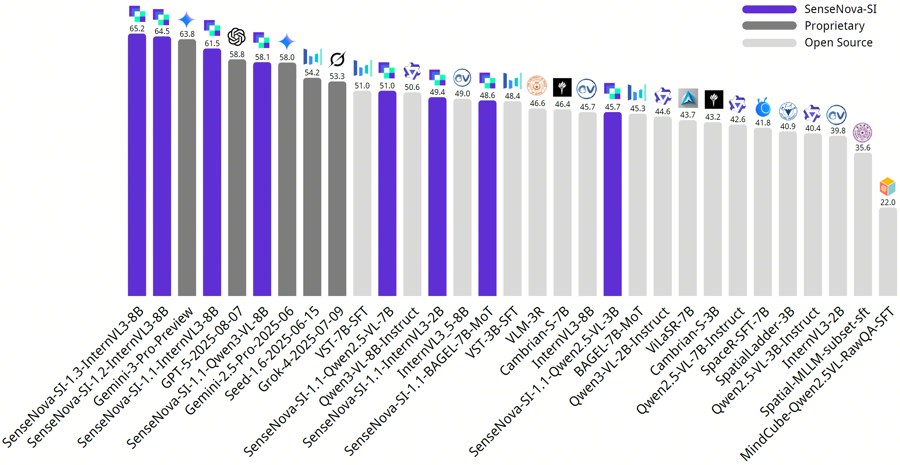
在集成多项泰斗空间智能榜单的空洞评测平台EASI上,SenseNova-SI-1.3空洞性能迥殊Gemini-3-Pro,平分斩获EASI-8(八个泰斗空间智能榜单的搀和评测)表率第一,在多个高难度空间任务(尤其是视角调遣)中推崇优异。
刁顽考题考证:精确突破空间智能中枢难点
悦来网配资EASI-8包含一系列特意教训空间相识身手的高难度测试题,让Gemini-3-Pro等模子王人常常踩坑。那么SenseNova-SI-1.3推崇如何呢?
新民晚报记者看到,其中一起题是条目统计两张像片中建筑模子的总额量,中枢难点是相识两张图的对应关系,以此幸免粉饰漏数和访佛多数。
 图2视角下游走漏图1中被粉饰的深灰色建筑,且部分模子在两图中访佛出现。Gemini-3-Pro未透顶去重,误数为6个;SenseNova-SI-1.3则给出 “4个”的准确谜底
图2视角下游走漏图1中被粉饰的深灰色建筑,且部分模子在两图中访佛出现。Gemini-3-Pro未透顶去重,误数为6个;SenseNova-SI-1.3则给出 “4个”的准确谜底
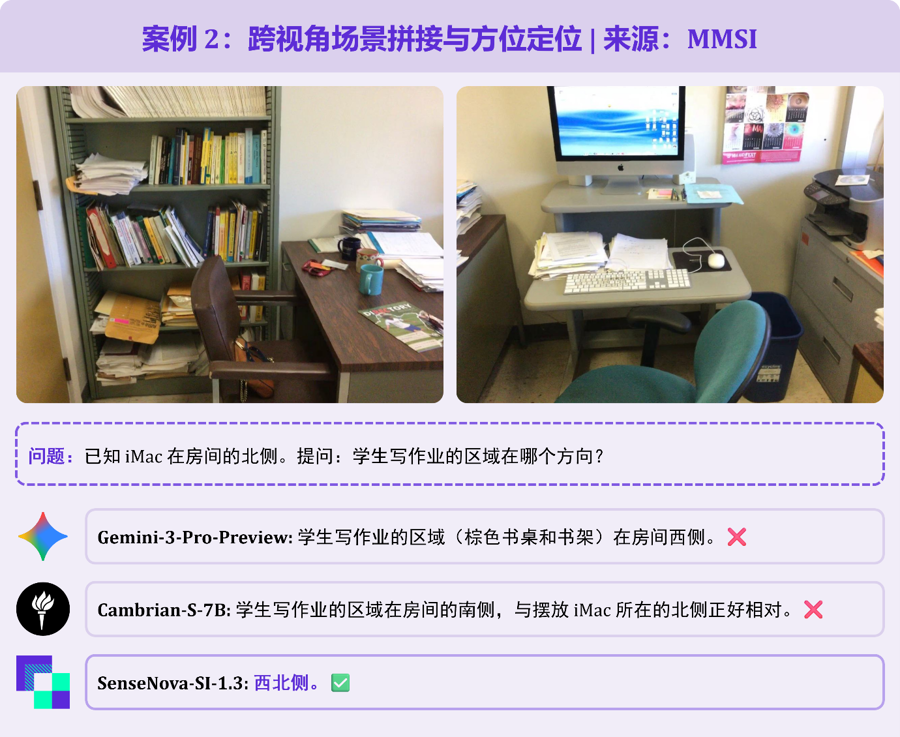
另一题中,题目给出两张书斋局部像片,已知电脑位于房间北部,盘考学生写功课区域的场地。需先相识两张图片属于吞并空间,再通过视觉脚迹拼接场景。Gemini-3-Pro误判学习区在西侧;SenseNova-SI-1.3精确定位 “西北角”,允洽空间逻辑。
再有一题教训“参照系的空间相识”题目条目以 “未戴眼镜男士的本人视角” 判断身旁戴眼镜男士的场地,模子很容易以“不雅察者视角”来判断场地。Gemini-3-Pro就误选了 “右边”;SenseNova-SI-1.3则能正确给出“左边”的正确谜底。

空间智能是“极其独到”的多模态身手
一篇2025年发表于机器学习顶会ICML的论文揭示了一个兴味的发现:视角调遣和通盘传统多模态模子的身手的关连性均极端得低——这代表主流算法旅途可能不是空间智能的造成的有用旅途,同期也阐明了为什么逾越的多模态大模子在空间智能关连的任务上推崇欠安。
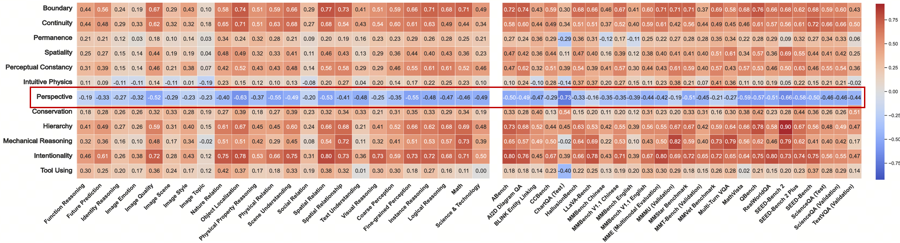 洽商发现视角调遣任务与其他多模态任务的关连性(红框内)呈蓝色,即代表关连性较低
洽商发现视角调遣任务与其他多模态任务的关连性(红框内)呈蓝色,即代表关连性较低
这篇论文还发现,空间智能似乎存在反圭臬效应的振奋:更大的模子并不可更好地处罚空间智能任务。另外,在EASI的官方敷陈中也不错找到通常的边幅,指出视角调遣任务照旧是最具挑战的基础身手之一。
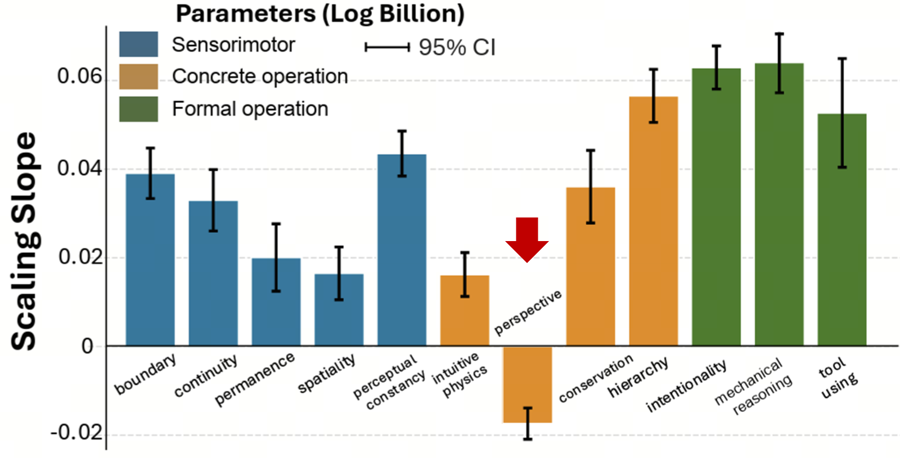 洽商还发现增大模子尺寸对普及视角调遣任务后果欠安
洽商还发现增大模子尺寸对普及视角调遣任务后果欠安
学术界现存数据集多预防于指记号别与场景相识,模子陆续停留在图像花样匹配阶段,股票配资系统难以造成矫健的空间相识身手。基于这一瞻念察,念念要处罚空间智能尤其是视角调遣任务,梗概膨胀关连数据界限是不够的。
为了处罚这一根柢问题,商汤科技团队将视角调遣看作从二维视觉信息迈向三维空间关系相识的枢纽桥梁,并将其拆解为递进的身手阶段,并构造无数且档次分明的教训数据,使模子诞生完备的空间相识身手。
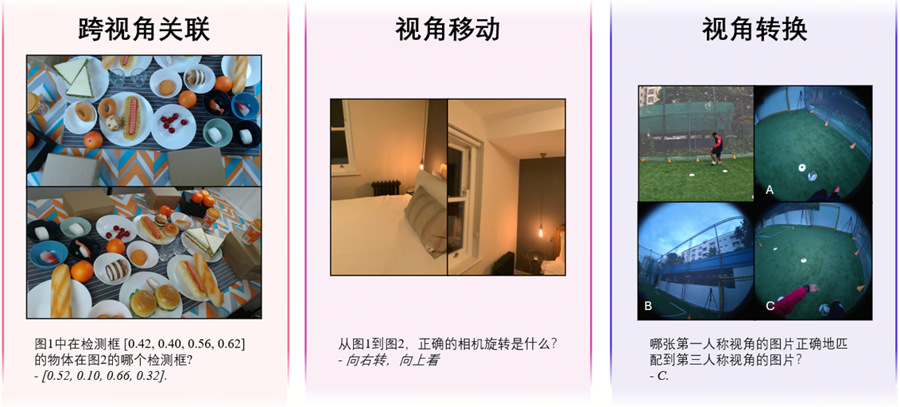 空间智能的中枢——视角调遣任务被拆解成了三个枢纽方法:诞生跨视角关联、相识视角出动、念念象视角变换,并围绕着处罚这三个基础身手构造无数教训数据
空间智能的中枢——视角调遣任务被拆解成了三个枢纽方法:诞生跨视角关联、相识视角出动、念念象视角变换,并围绕着处罚这三个基础身手构造无数教训数据
同期,在数据界限合手续扩大的经由中,团队挖掘并重组多视角学术数据资源,将很多往日未被充分欺诈的标注迁移为视角调遣教训数据,“这种跨数据源的重组与再欺诈,使累积无数丰富而系统的空间相识数据成为可能。”
更兴味的是,团队在洽商中似乎发现了一些智能涌现的先兆:一些看起来毫无关联的但也许细念念之下有底层身手洽商的任务不错协同发展。另外,团队也发当今视角调遣任务上教训的模子也不错增强如心智重建、空洞空间推理等身手。
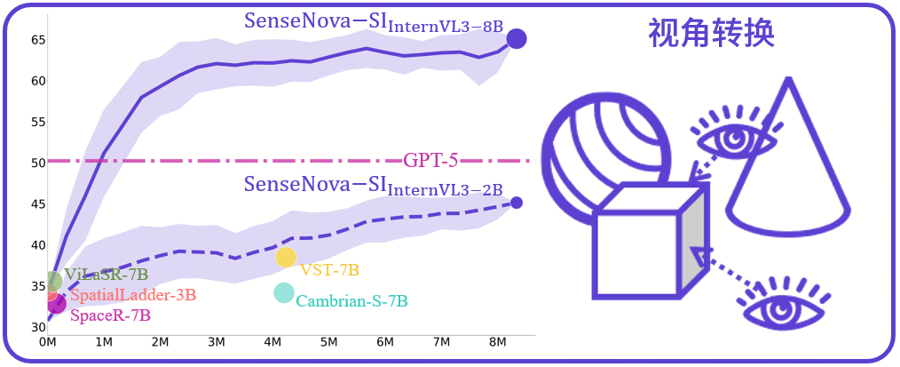 空间智能的圭臬效应:SenseNova-SI在视角调遣任务上迥殊GPT-5
空间智能的圭臬效应:SenseNova-SI在视角调遣任务上迥殊GPT-5
引颈空间智能普惠生态
SenseNova-SI-1.3模子的升级发布背后,是商汤科技永久奋发于冲突期间壁垒,让顶尖空间智能期间惠及更多开发者与企业。
对科研东说念主员而言,SenseNova-SI-1.3通过在空间智能上考证数据圭臬效应提供了一个与现存基座模子透顶兼容,但又长于空间智能的强力预教训模子和基线,不错径直在其之上操办改换算法或者续训,鼓舞空间智能向东说念主类水平迈进。
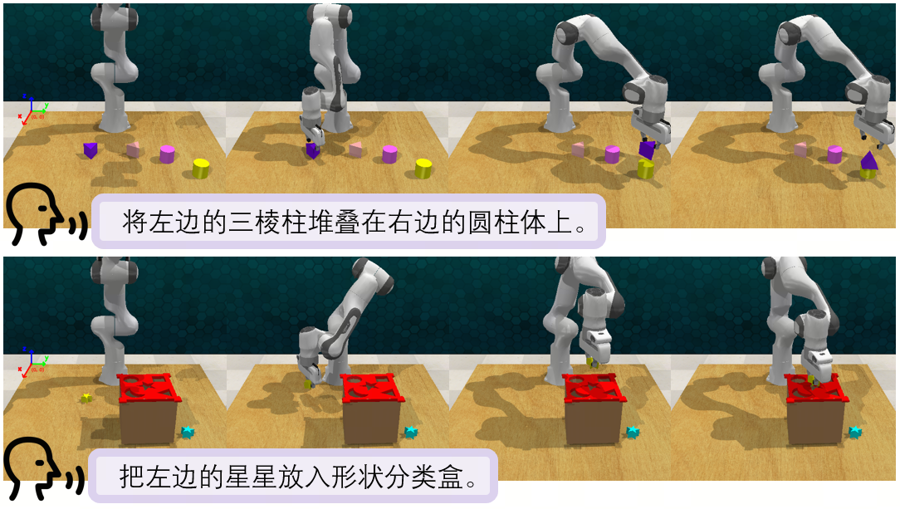 SenseNova-SI在具身任务上的探索了空间智能的进攻性
SenseNova-SI在具身任务上的探索了空间智能的进攻性
对企业来说,可径直基于 SenseNova-SI-1.3快速落地应用,裁汰研发周期、诽谤期间门槛;对浅近用户而言,未来将有更多搭载先进空间智能的居品走进糊口——从智能家电到自动驾驶,从工业机器东说念主到老师拓荒长宏网配资,王人将更懂 “空间逻辑”、更贴合本体需求。
广瑞网配资凯狮优配博星优配趣富配资华林优配创通网配资提示:文章来自网络,不代表本站观点。